PENTAX K‑1 Mark II 天体改造機 × ZWO AM5 × NINA環境へ移行し、PCプレビューの活用で極軸合わせ・天体導入・ピントが安定し、撮影の失敗が大きく減りました。SWAT‑310などのポータブル赤道儀を中心に運用していた頃と比べ、準備時間は依然として長いものの、精度は明確に向上しました。この記事では実運用の手順と気づきをまとめます。
この安定性のおかげで、天体撮影にはあいにくの天気が続く夏の夜でしたが、運よく「はくちょう座付近」を撮影できたので、作例として紹介します。機会があれば、風物詩の夏の大三角をHD PENTAX‑D FA 21mmF2.4ED Limited DC WRでも撮ってみたいと思っています。
この記事のポイント
撮影環境(機材・ソフト)
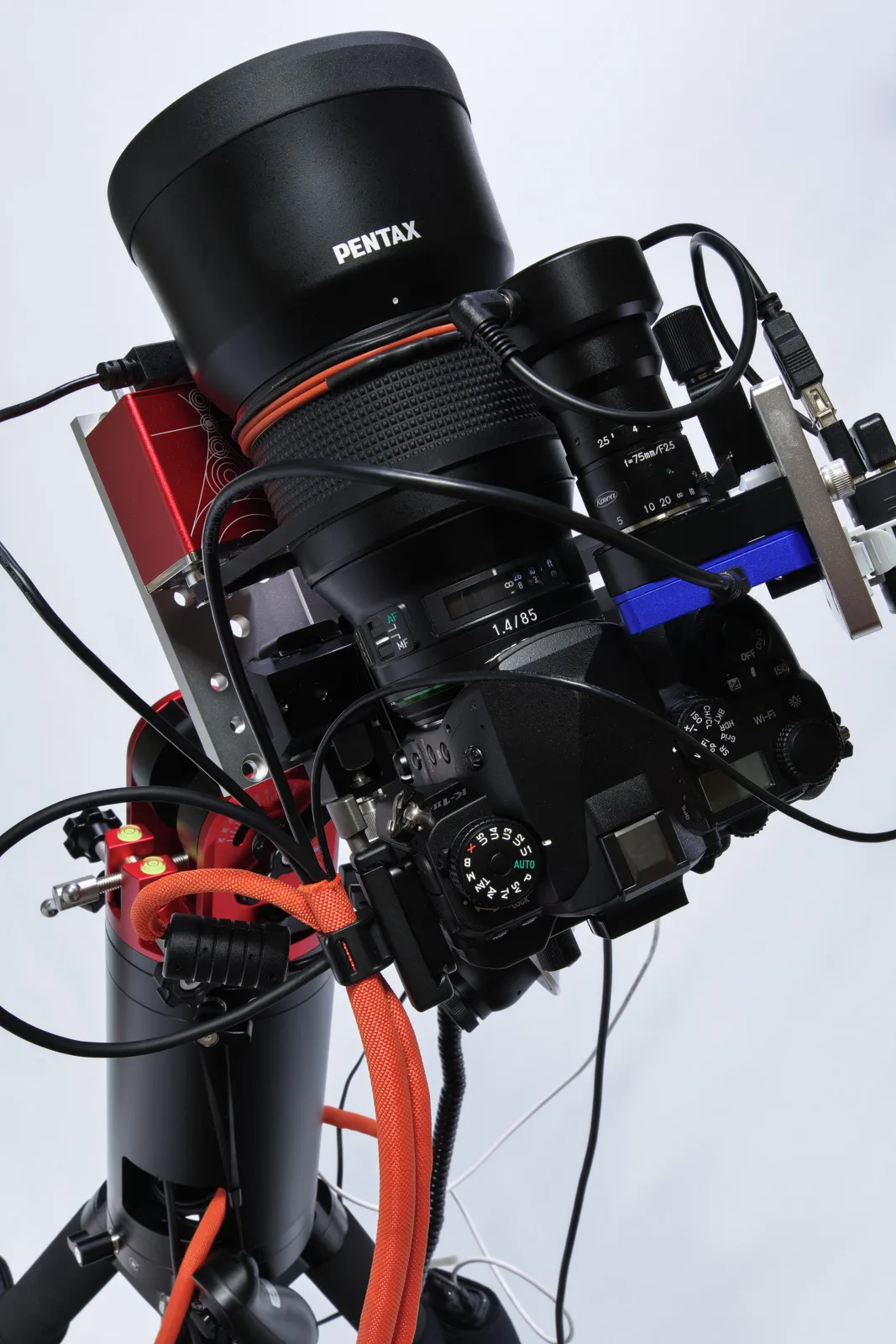

| カメラ | PENTAX K‑1 Mark II 天体改造機 |
| レンズ | HD PENTAX-D FA ★ 85mmF1.4ED SDM AW |
| フィルター | STC クリップフィルター アストロ マルチスペクトラ |
| フォーカサー | ZWO EAF |
| 赤道儀 | ZWO AM5 |
| ガイド | LACERTA MGEN‑3 |
| 制御ソフト | NINA Version 3.1 HF2 |
工夫した点(安定化・取り回し)
- 赤道儀・ピラー・三脚・ケーブル・AC・MGEN‑3は基本固定(設置は容易だが重量増)
- ピラー内USBハブで配線を一体化(ケーブル余長を確保)
- K‑ASTEC湾曲ダブテールで縦横切替+光軸ズレ低減
- EAFとMGEN‑3は干渉しない高さ・向きに配置
- EAFのバンド交換でHD PENTAX‑D FA ★ 50mmF1.4 SDM AWにも対応
とりわけPENTAX一眼レフ×一眼レンズ×EAFの構成例はほとんど見かけず、K‑ASTEC湾曲ダブテールの活用など配置は相当試行錯誤しました。これらの工夫のおかげで、現状の構成には非常に満足しています。
ワークフロー詳解(要点のみ)
設営
- 三脚は一本の脚を北側に向ける(南を撮ることが多いので重心が取りやすい)
- 赤道儀の向きは「GPS Status」アプリでおおまかに北へ合わせる(目視でも確認)
- ポータブル電源はウェイト代わりにストーンバッグへ入れて安定化
- はやる気持ちを抑え、先にテーブル・チェアを設置する(意外と重要)
一時期は三脚の水平出しにこだわり、SUPER MOUNT Level Footを導入しましたが、最近はあまり気にしなくなりました。
極軸合わせ
- レンズのピントリングを無限遠に合わせてEAFとバンド固定する
- EAFのコントローラーとカメラの背面モニターを使用して、大体のピントを合わせる
- PF‑L + PF‑L Assistでおおまかに合わせる
- PoleMasterで追い込み
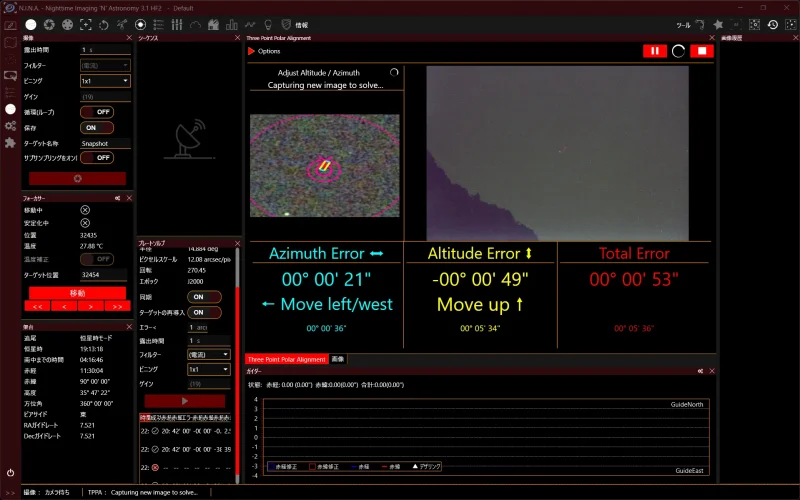
PoleMasterでの調整時に挙動がおかしくなるケースがあり、NINAのプラグインThree Point Polar Alignmentへの移行も検討しています。ただ、極軸調整ねじでの微調整は至難の業で、これもコントローラーで微動できると良いのですが。
天体導入

- Stellariumで対象を検索し、フレーミングを決める
- NINAのフレーミングアシスタントに同期
- プレートソルブで導入・微修正
撮ってはプレビューを繰り返すのが当たり前だった私には、初めての天体導入は感動でした。あらかじめ決めたフレーミングどおりに撮れるのは想像以上に気持ちがよいものです。いまだに縦位置・横位置のイメージがつかめず、何度か試してしまうのはご愛嬌。
過去に誤動作で機材同士が接触したトラウマ(天体導入あるある?)があり、いつでも赤道儀の電源を落とせるよう待機しています。
ピント合わせ

NINA標準のオートフォーカスでピントを追い込みます。ピントリングを直接操作してのピント合わせは難しく、EAFでのオートフォーカスはとても快適です。オートフォーカスの実行タイミングは迷いどころですが、私は極軸合わせの後、天体導入の前に実行しています(なんとなくで特別な意図はありません)。
プレビュー
NINAの撮像パネルを活用し、ストレッチ表示も併用して、ピント・星像の流れ・周辺減光・構図ズレに破綻がないかを確認します。このプレビューは非常に便利で、背面モニターをルーペで覗く運用にはもう戻れません。
プレートソルブ
85mmで「望遠鏡が公差外」エラーが出ることがありますが、撮像パネルからソルブを実行すると成功することがありました。原因はまだ分かっていません。
子午線反転
NINAの子午線反転機能により「自動反転→再導入→プレートソルブ→ガイド再開」は自動化されています。PENTAX機はNINAからBモードを制御できないため、以下の手動対応のみ行います。
- 子午線反転開始時に素早くMモードに切り替え
- プレートソルブ終了時に素早くBモードに切り替え
プレートソルブ時にシャッタースピード制御の都合でMモードを挟みます。
作例
はくちょう座付近の散光星雲(北アメリカ/ペリカン/サドル/網状)

カメラ:PENTAX K‑1 Mark II 天体改造機
レンズ:HD PENTAX-D FA ★ 85mmF1.4ED SDM AW
フィルター:STC クリップフィルター アストロ マルチスペクトラ
焦点距離:85mm
絞り値:F4.0
ISO:3200
露出(秒 × 枚数):60 × 50
追尾/ガイド:AM5/MGEN‑3
撮影日時:2025/7
撮影地:奥多摩
現像ソフト:PixInsight / Lightroom
撮影風景
カメラ:PENTAX K-3 Mark III
レンズ:HD PENTAX-FA 43mmF1.9 Limited

FAQ
- QNINAのAF前にピント調整する理由は?
- A
私の環境では、事前にEAFで当たりを付けてからAFを実行すると、所要時間が短くなる傾向があるためです。
- Q子午線反転でM/Bモードを切り替える理由は?
- A
PENTAX機はNINAからBモードの露出制御ができないため、反転中はMモードで短秒露出のプレートソルブを行い、完了後にBモードへ戻しています。
- Q極軸合わせでPoleMasterの挙動が不安定な時は?
- A
最初からやり直すか、NINAのThree Point Polar Alignmentへ切り替えることがあります。
- Q導入時の暴走対策は?
- A
ピラー内にUSBハブを収納して余長を確保し、干渉しやすい箇所は事前に可動範囲を確認しています。また、動作中はいつでも電源を切れる態勢で待機しています。
参考リンク・出典
まとめ
NINAのワークフローにより、極軸合わせ・導入・ピントが安定し、撮影の失敗が大きく減りました。極軸はPF‑Lで大まかに合わせ、PoleMaster(状況によりNINAのThree Point Polar Alignment)で追い込みます。導入はStellarium連携とプレートソルブで成功率を高め、干渉やケーブルの余裕は事前に確認。非常時はすぐ電源を落とせる態勢で臨んでいます。
同じ構成の方は少ないと思いますが、NINA導入の参考になれば幸いです。